全国百强科技期刊
2月26日
在软组织工程和柔性电子器件快速发展的背景下,水凝胶材料因其优异的生物相容性和可调机械性能而备受关注。然而,传统水凝胶在长期循环加载条件下极易发生疲劳断裂,这一固有缺陷严重制约了其在人工肌肉、承重植入物和软体机器人等领域的实际应用。尽管研究人员通过双网络结构、纳米晶体增强等策略将水凝胶的疲劳阈值提升了2-3个数量级,但如何实现跨尺度的分层结构精确调控,仍然是该领域面临的重大挑战。
南方科技大学刘吉副教授课题组提出了一种受生物启发的扭转分层结构设计策略,成功制备出具有超高抗疲劳性的水凝胶纤维。通过精确控制扭转参数,研究团队实现了拉伸应变提升200%、断裂韧性增加150%、疲劳抗性提高1000%以上的显著突破,为传统聚合物水凝胶网络赋予了前所未有的抗疲劳性能,标志着功能性软材料设计的重大进展。相关论文以“Fatigue Resistant Hydrogels Engineered With Twisting Hierarchical Structures”为题,发表在Advanced Materials上。
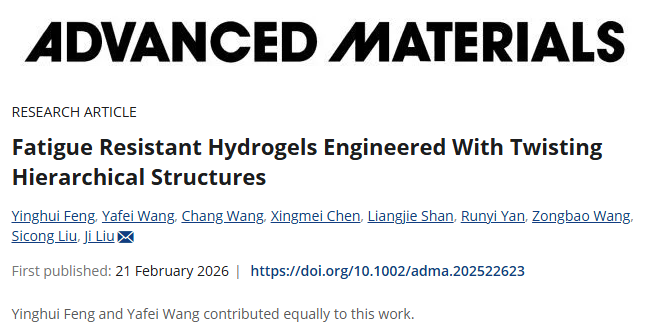
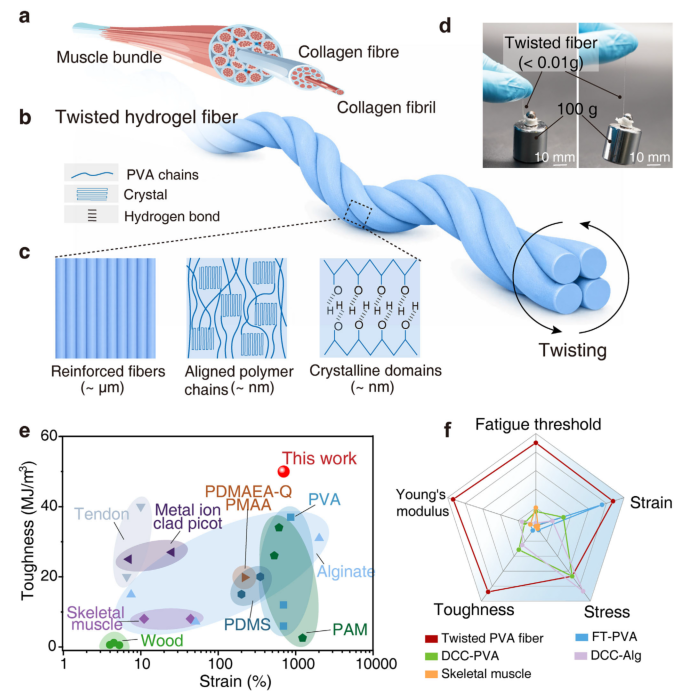
图1 | 扭转水凝胶纤维的设计理念和力学性能。(a)受天然肌肉束和胶原纤维分层结构启发的多尺度扭转纤维设计示意图。(b,c)扭转纤维展现出优异的韧性、应变耐受性和剪切强度。(d)扭转纤维可承受超过自身重量10000倍的载荷(100克砝码)。(e,f)与天然及合成软材料相比,扭转纤维在高韧性和大拉伸性能方面达到此前未及的区域,在多指标综合力学性能上表现优异。
研究团队以聚乙烯醇(PVA)为模型材料,开发了“拉伸-扭转-热退火”三步法构建分层结构(图2a)。首先通过限域干燥拉伸诱导聚合物链沿纤维轴向排列,形成纳米原纤维结构;随后施加精确控制的扭转使纤维获得螺旋形貌;最后通过热退火处理在纤维内部及界面形成氢键锁定结构。扫描电镜和荧光成像显示,扭转后纤维表面出现周期性原纤维排列纹理(图2b),溶胀测试证实结构完整性得到保持(图2c)。小角X射线散射分析表明,扭转处理使相邻晶区距离缩小至12纳米,结晶度达到约35%(图2d),显著优于其他加工方法。力学测试揭示4股200捻/米是最优构型参数,该条件下纤维的拉伸强度和断裂伸长率同步提升,线性弹性区斜率最陡(图2e,f),表明结构实现了最优化的应力传递效率。
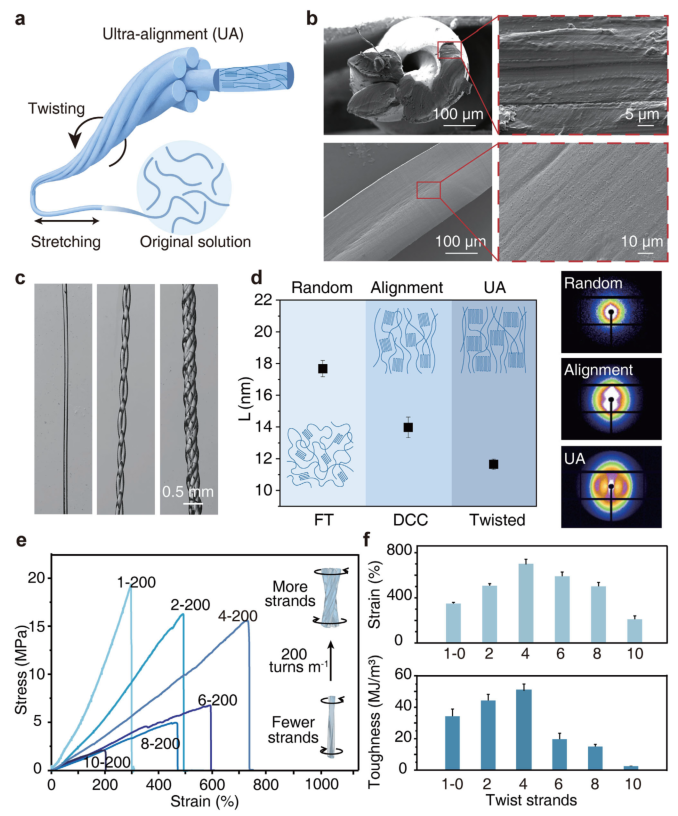
图2 | 扭转水凝胶纤维材料的分层结构与力学性能 (a)扭转水凝胶纤维材料的分层结构示意图。(b)扭转水凝胶纤维材料的横截面扫描电镜图像。(c)单根水凝胶纤维及不同扭转参数下扭转纤维的代表性图像。(d)从小角X射线散射测量得到的水凝胶纤维材料晶区平均距离估算值,以及各样品的SAXS图谱。(e)不同扭转参数下扭转水凝胶纤维材料的代表性拉伸应力-应变曲线。第一个数字表示纤维数量,连字符后的数字表示捻度(转/米)。例如,2-200表示2股纤维200转/米。(f)这些扭转水凝胶纤维样品的力学参数(如应变和韧性)汇总。图(d)和(f)数据以平均值±标准差表示,n=3。
抗疲劳性能评估采用经典单缺口法(图3a),结果显示扭转处理后纤维的裂纹扩展速率较传统冻融法和DCC法降低1-2个数量级。通过线性外推裂纹扩展速率与能量释放率曲线,测得扭转纤维的疲劳阈值突破4500 J/m²(图3b,c),相比冻融法(40 J/m²)提升100倍,较DCC法(800 J/m²)提升5倍,超越聚两性电解质水凝胶(100 J/m²)、PVA/氧化石墨烯复合材料(1700 J/m²)甚至骨骼肌组织(约1000 J/m²)(图3d)。10000次循环加载测试证实纤维可保持90%以上的应力承载能力(图3e),应力-应变曲线几乎不变,表明累积损伤极小。该方法在海藻酸盐纤维和羟乙基纤维素纤维体系中也获得验证(图3f-h),展现出优异的材料普适性。
图3 | 具有扭转结构的水凝胶纤维材料的疲劳抗性 (a)测量预切口水凝胶材料在水浴中每循环裂纹扩展量对能量释放率G的示意图,以避免机械测试过程中水凝胶材料失水。(b)各类水凝胶样品(包括FT-PVA、DCC-PVA和扭转PVA纤维)的dc/dN对G曲线图。将曲线线性外推与横轴截距得到临界能量释放率Gc,定义为样品的疲劳阈值(Γ₀)。(c)水凝胶样品量化疲劳阈值(Γ₀)汇总。(d)通过绘制各种高机械性能水凝胶材料(包括聚两性电解质水凝胶(100 J/m²)、PVA/氧化石墨烯复合材料(1700 J/m²)以及生物组织如骨骼肌(约1000 J/m²))的疲劳阈值与强度对比图。(d,e)通过对预切口样品施加4500 J/m²能量释放率进行10000循环测试,验证扭转PVA水凝胶纤维样品的估算疲劳阈值。(f-h)采用相同扭转结构的5 wt.%或10 wt.% PVA纤维、海藻酸盐纤维和HEC纤维样品的拉伸强度、韧性和疲劳阈值(Γ₀)汇总,以验证我们设计和制造策略的普适性。图(b)、(c)和(f-h)数据以平均值±标准差表示,n=3。
为揭示扭转增强机理,研究团队建立了基于耗散粒子动力学的多尺度计算框架(图4a),通过Python算法构建精确的螺旋结构模型(图4b)。模拟结果表明,4股纤维在约10%工程应变下呈现最优轴向应力传递(图4c),而过度扭转(10股)会导致应力分布紊乱(图4d)。几何分析显示,4股纤维在5%-20%应变范围内旋转矢量的z分量均匀增加(图4f),表明截面协同旋转;而10股纤维在2%-8%应变区间z分量交替变化(图4g),出现反向旋转失效机制。剪切应变表征证实,4股体系在5%-25%应变范围内保持均匀分布(图4h),通过纤维间滑移和扭转耗散能量;10股体系则在约9%应变处出现局部剪切集中(图4i),最终导致几何锁死和打结现象。
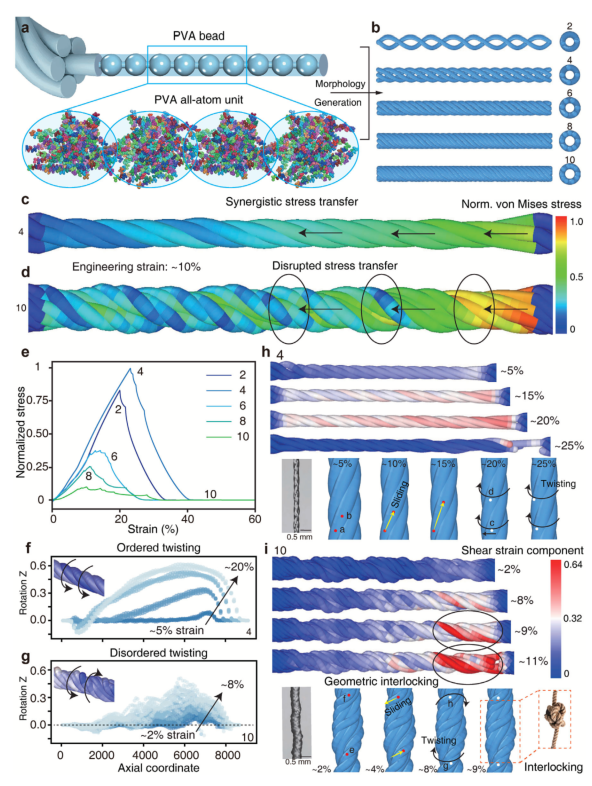
图4 | 扭转水凝胶纤维材料拓扑和几何效应的多尺度分析 (a)基于DPD的跨尺度计算框架示意图。(b)通过Python程序生成的螺旋纤维结构。(c)四股纤维在约10%工程应变下的归一化冯·米塞斯应力场,显示协同应力传递。(d)十股纤维的冯·米塞斯应力场,显示应力传递被破坏。(e)不同扭转圈数纤维的非线性DPD模拟应力-应变曲线,通过强度、应变和韧性的演变趋势确认四圈为临界阈值。(f)对于四股纤维(4股200捻/米),旋转矢量的z分量随拉伸应变(约5%-20%)均匀增加,表明截面协同旋转。(g)对于十股纤维(10股200捻/米),旋转矢量的z分量随应变(约2%-8%)交替变化,反映截面相对两侧间的相对扭转。(h)在四股纤维中,剪切应变分布在约5%-25%的拉伸应变范围内保持均匀,证明纤维间/纤维内滑移和扭转。(i)在十股纤维中,约9%拉伸应变时,纤维束末端出现局部剪切应变,结合相对滑移和扭转,导致几何锁死及随后的互锁和打结。
基于上述成果,团队仿生蛙舌肌肉分层结构,设计制备了柔性气动致动器(图5a,b)。将扭转水凝胶纤维作为承重和弹性回缩元件嵌入Ecoflex基体,通过气动通道实现可编程形变(图5c)。在模拟捕食任务的验证中,该人工蛙舌可在20秒内完成伸展、捕获、收缩和回收的全过程(图5d)。传统无增强致动器通常在有限循环后出现微裂纹扩展和界面剥离,而扭转纤维增强体系在10万次(约500小时)循环致动后,预切口样品仍保持结构完整,未检测到裂纹扩展、分层或界面分离(图5e),致动响应速度提升约60%,卷曲曲率半径减小约40%。
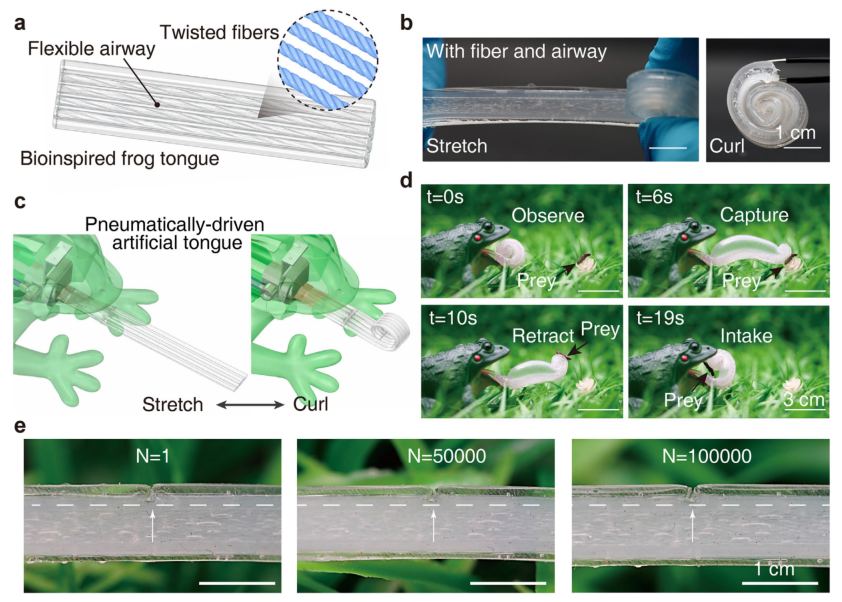
图5 | 作为蛙舌状致动器承重组件的功能展示 (a)舌状致动器的几何结构示意图,包含作为承重组件的扭转水凝胶纤维以及作为气动致动通道的气路。(b)制备好的软致动器图像,以及通过气动驱动使舌状致动器伸展/卷曲的图像。比例尺:1厘米。(c)带有气动驱动人工舌的仿蛙机器人示意图。(d)仿蛙机器人捕获猎物轨迹的快照图像。舌头通过气动驱动伸展、捕获猎物、收缩和收回猎物,整个过程在20秒内完成。比例尺:3厘米。仿蛙机器人(商业外壳)购自淘宝(中国在线市场)。图像由作者提供。(e)预切口(总宽度的1/5)人工舌在10万次(约500小时)长期形变前后的图像。比例尺:1厘米。
该研究建立的扭转诱导多尺度取向策略为工程化抗疲劳水凝胶纤维提供了普适性解决方案。通过从分子链到宏观原纤维的分层结构调控,研究团队在化学组成多样的水凝胶体系中实现了韧性(提升150%)、可拉伸性(200%应变)和疲劳抗性(提升1000%)的协同增强。受胶原/肌腱生物力学启发,这种螺旋结构通过可逆氢键断裂和可控原纤维滑移实现多尺度能量耗散,有效解决了水凝胶疲劳失效的持久性挑战。除了软致动应用,兼具组织样柔顺性、高循环耐久性和纤维几何特征的该平台材料,有望在人工肌腱韧带、手术缝线和机械稳健的植入式界面等生物集成领域展现广阔前景。
(来源:高分子科学前沿)
※ 有关作品版权事宜请联系:010-84463638转8850 电子邮箱:info#texleader.com.cn
纺织导报官方微信



© 2026 《纺织导报》 版权所有
京ICP备10009259号-3
 京公网安备 11010502045125号
京公网安备 11010502045125号


