全国百强科技期刊
6月3日
柔性传感器在可穿戴电子、软体机器人等领域需求迫切,但现有传感器多采用聚合物基底,存在热稳定性差、不耐火焰、耐磨性低、化学耐久性不足等缺陷,严重限制了其在高温、腐蚀等极端环境中的应用。无机纤维织物(如二氧化硅织物)虽具有优异的高温稳定性和机械鲁棒性,但其本身电绝缘,无法直接用于传感。传统表面涂层策略在引入导电性时,往往牺牲柔性、降低热稳定性或依赖有害工艺。因此,如何通过可持续、可扩展的路径在无机织物上直接生长高质量导电层,是该领域亟待解决的核心挑战。
鉴于此,北京工业大学崔光博士、王慧慧副研究员和北京大学刘忠范院士共同开发了一种缠绕式化学气相沉积(CVD)方法,使用废弃塑料垃圾袋(PGBs)作为固体碳前驱体,在二氧化硅织物(SF)上实现了均匀的石墨烯生长,得到石墨烯@二氧化硅织物(G@SF)。该方法不仅能够以高性价比的方式生产用于传感器制造的纺织品,同时还能实现废弃塑料的升级利用,以应对环境污染问题。通过利用织物的编织结构和石墨烯层的激光响应特性,可通过可编程激光擦除技术,从所得G@SF中制造出多功能传感器。这些传感器具备可靠的多模态传感能力,包括温度检测、压力监测、形变探测和近场通信(NFC)。G@SF传感器展现出高达1000°C的卓越热稳定性、优异的机械柔韧性和化学鲁棒性。一个集成了G@SF传感器的概念验证智能手套,进一步突显了其在恶劣条件下的多功能性和 resilience。相关成果以题为“Upcycling of plastic garbage bags to graphene@silica fabric for sensing platforms”发表在最新一期《nature sustainability》上。
通过插层缠绕CVD法制备G@SF
在本研究中,聚乙烯(PE)塑料垃圾袋被重新用作制备G@SF的固体碳源。将压平的PGBs切割成片,并与SF(0.4×10 m²)共同卷起,然后放入CVD炉中。这种插层共缠绕结构使固体碳源能够均匀分布在每一层SF之间,为沉积过程提供连续且均匀的碳供应。在高于600°C的热解过程中,PGBs分解为小分子,并在900°C以上进一步分解为CH₄(n≤3)、Cₙ(n≤4)和C₂H₂等活性碳物种。由于PGBs被共卷在每一层SF之间,生成的活性碳物种在每一层附近释放,实现了在整个织物卷中的均匀分布。超声清洗去除残余炭黑后,即可获得大面积的G@SF(0.4×10 m²)。
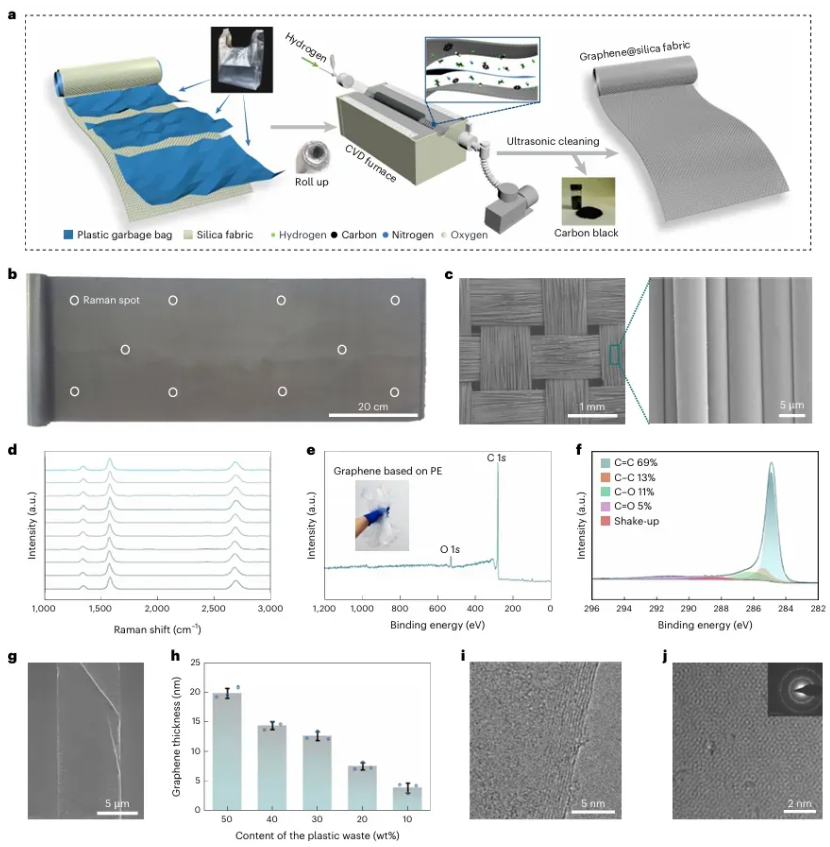
图 1 基于PE-PGBs的G@SF的制备与表征
塑料类型对石墨烯合成的影响
研究还探讨了不同类型PGBs(PET、PP和PE)对合成石墨烯质量的影响。拉曼光谱分析表明,以PE为碳源制备的石墨烯质量最高,表现为相对较低的D峰强度和典型的多层石墨烯特征。气相色谱(GC)分析显示,PE高温热解产物中产生了丰富的甲烷和乙烯基活性基团,这两种基团是石墨烯生长的关键中间体。相比之下,PET的热解产物中含氧官能团和活性部分易形成复杂的大分子量有机基团,难以有效形成石墨烯。对于PP衍生的石墨烯(PP-G),其热解产物中乙烯基基团的相对数量远低于PE。有趣的是,彩色PGBs中含有的有机染料会将其中的氮原子自然掺杂到石墨烯中,XPS分析确认了约1 at.%的氮掺杂含量有助于提高电导率。
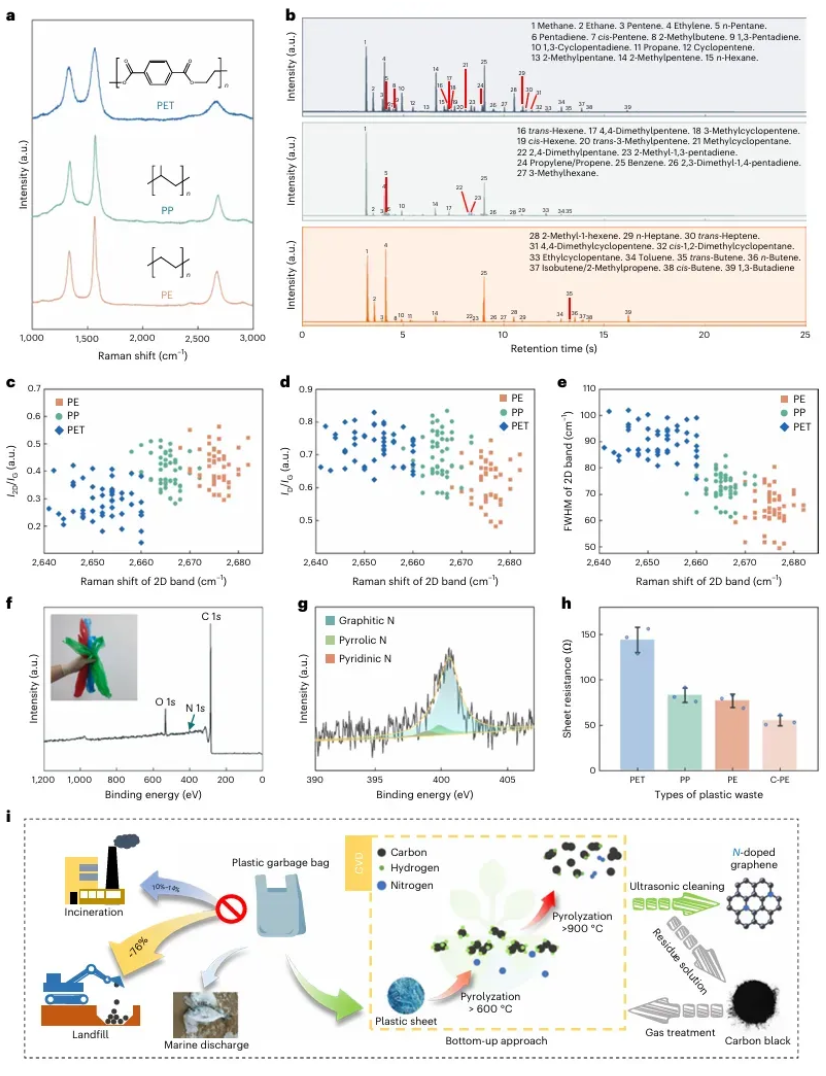
图 2 来源于PGB的材料及其转化过程的全面表征
通过激光擦除技术制备G@SF传感器
与常用于有机基底柔性传感器的激光诱导石墨烯类似,G@SF的石墨烯层可使用优化功率和波长的激光直接擦除,形成精确的几何图案。由于G@SF表面石墨烯层的多次反射,照射路径上的局部温度可达720~750°C,从而选择性地快速氧化石墨烯层。通过预编程激光路径,可创建各种复杂图案,拉曼图谱证实了激光写入的高分辨率和精度。该技术可精确调控G@SF的方阻分布,在柔性电路和多功能传感器领域具有巨大潜力。
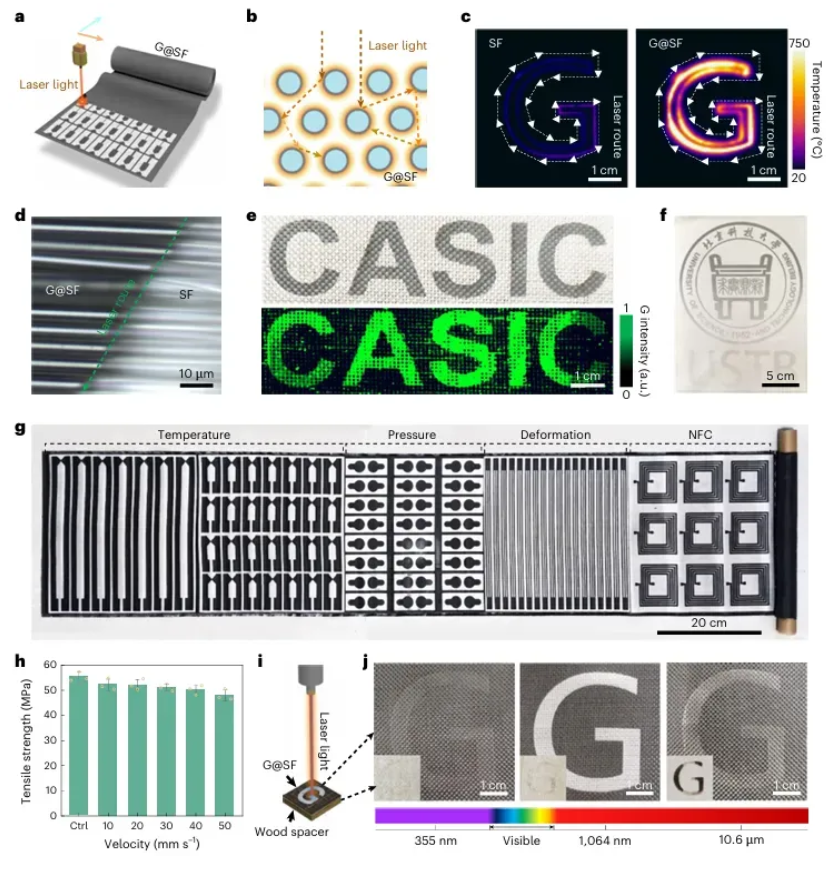
图 3 G@SF 传感器阵列的激光清除过程及相应参数优化
G@SF传感器在极端条件下的耐久性测试
得益于其全无机组分,G@SF传感器在直接火焰暴露后仍能保持结构完整性和电阻稳定性。即使被图钉刺穿产生可见孔洞,SF网络的弹性恢复可使孔洞闭合,产生自修复效果,电阻变化微乎其微。经过300次循环后,G@SF形变传感器的基线电阻保持不变;在1000次连续循环后,信号衰减不超过5%。此外,该传感器在各种溶剂(20% H₂SO₄、15% KOH、饱和NaCl溶液、汽油和N-甲基-2-吡咯烷酮)中浸泡并超声清洗后,电阻无明显变化。其表面具有疏水性(去离子水接触角≈130°),同时仍保持透气性。卓越的热稳定性还使其具备高温自清洁能力。
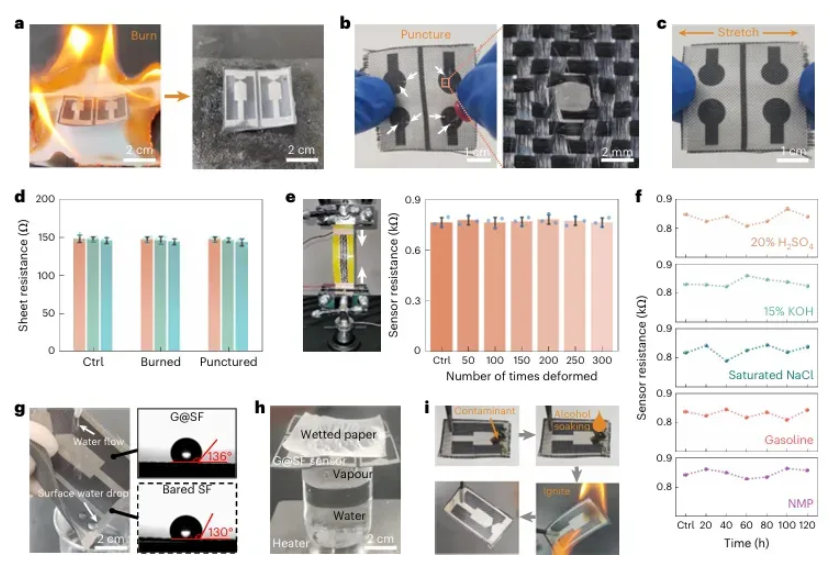
图 4 G@SF 传感器的耐用性性能测试
G@SF传感器的性能
温度传感器:基于方阻为150 Ω/sq的G@SF制备的温度传感器,通过调节电极接触宽度D,可将传感器分辨率从2 Ω/10°C调至9 Ω/10°C。在600°C以下,其电阻-温度曲线在真空和空气中保持一致;在600°C以上,空气中的电阻增长显著快于真空中。在空气中于600°C退火540s后,氧化孔逐渐扩大,导电路径几乎被破坏,电阻趋于无穷大。
形变传感器:弯曲形变会减小G@SF纤维间的间距,从而降低Y方向的接触电阻。该传感器可区分不同弯曲角度(5°、10°和15°)和弯曲速率,响应时间约为0.2s,灵敏度可达约0.1%/度,最大可测量角度为180°。
压力传感器:通过折叠图案化区域形成重叠接触面积来实现压力传感。施加压力时,石墨烯包覆纤维之间的垂直距离减小,降低接触电阻。该传感器可响应不同压力大小(1 kPa, 5 kPa, 10 kPa),响应时间约为0.18s,灵敏度可达约1%/kPa,最大可测量压力约为52 kPa。研究对比发现,平纹组织的SF在结构稳定性和信号保真度方面更具优势。
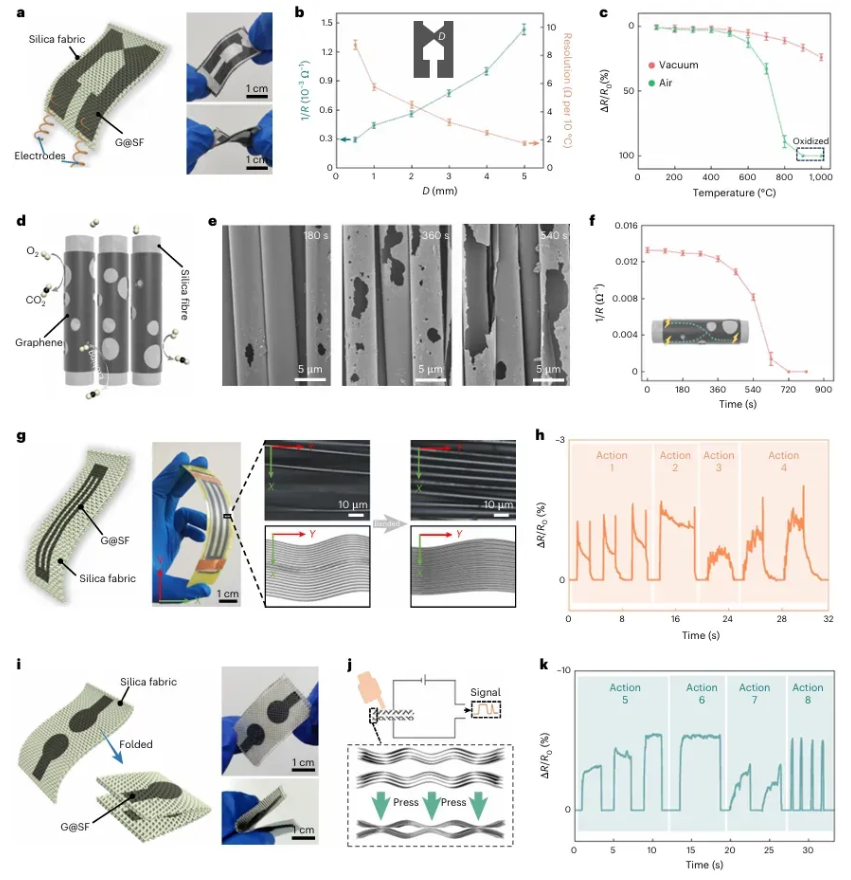
图 5 不同类型G@SF传感器的性能
集成G@SF传感器的智能手套
得益于激光直写擦除的设计灵活性,多种传感模式可被集成到一个G@SF平台上。所制备的智能手套包含四个主要功能区域:指尖压力传感器、掌心温度传感器、指关节形变传感器和一个NFC模块。该手套即使在燃烧条件下也能进行温度测量,且指尖压力传感器在燃烧后仍能通过分析指尖压力差异来检测抓取物体的粗略形态。指关节处的形变传感器可响应不同手势。通过拇指和食指捏合,压力传感器可作为莫尔斯电码发射器;为提高传输效率,研究还开发了快速莫尔斯模式,将食指、中指和无名指分别映射为划、点和空格,传输“北京科技大学”的时间从传统模式的约94s缩短至43s。此外,手套的压力和形变传感器还可协同工作,控制无人机(UAV)的起降。
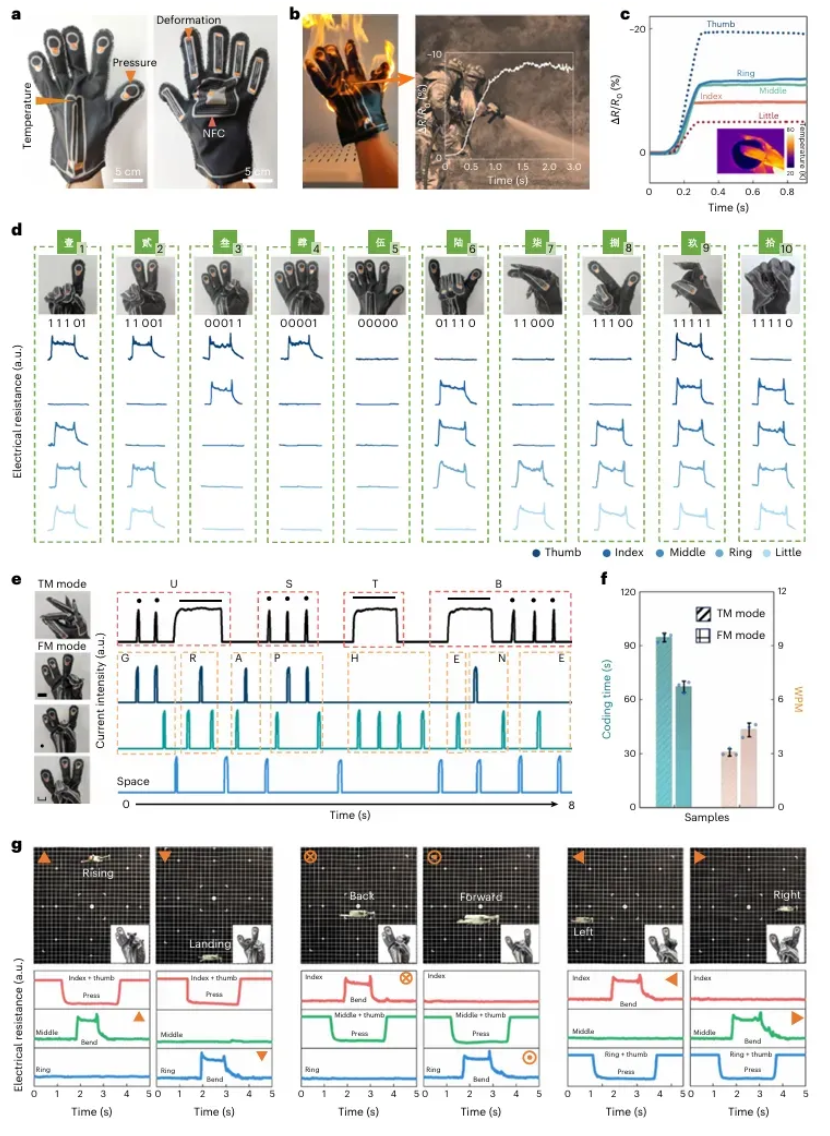
图 6 基于G@SF传感器的多功能感应手套的性能
(来源:高分子科学前沿)
※ 有关作品版权事宜请联系:010-84463638转8850 电子邮箱:info#texleader.com.cn
纺织导报官方微信



© 2026 《纺织导报》 版权所有
京ICP备10009259号-3
 京公网安备 11010502045125号
京公网安备 11010502045125号


