全国百强科技期刊
4月9日
人体运动精准捕捉是运动康复、可穿戴设备与人机交互等领域的核心技术,其中肩关节结构复杂、活动自由度高,实现其三维运动长期稳定监测一直是技术难点。如何在真实场景中实现高精度、低成本、长时间的肩部运动追踪,成为该领域亟待解决的关键挑战。
对此,哈佛大学Conor J. Walsh教授团队提出了一种全新的多模态可穿戴传感系统:将惯性测量单元(IMU)与柔性应变传感器(SS)融合,并结合机器学习算法,实现无需复杂校准、可持续超过1h的高精度三维肩关节运动追踪。
这项技术的载体,是一件内置传感系统的紧身智能运动衣。衣物上集成了两类核心传感器,躯干与上臂位置装配IMU,肩部环绕布置 8 个SS。柔性传感器可实时感知衣物拉伸变化,反映肩部关节运动,而团队研发的 FIS 融合算法,则是这套系统的核心。
算法借助卷积神经网络,先通过柔性传感器信号测算出无漂移的肩部运动数据,再用该数据修正惯性测量单元随时间推移产生的航向漂移。这种融合方式充分发挥两类传感器的优势,既保留惯性测量单元短时监测精度高的特点,又依靠柔性传感器解决长期使用的漂移问题。同时该系统校准流程十分简便,耗时不足2.5min,用户只需自由活动手臂即可完成模型训练,无需专业实验设备,大幅降低了使用门槛。
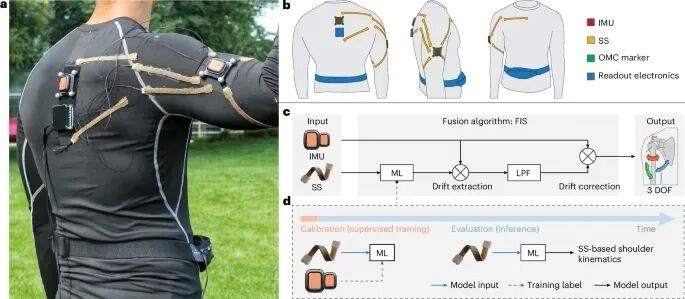
可穿戴智能传感衣与FIS融合算法整体框架
为了验证系统性能,研究团队邀请6名受试者,在超过7h的真实生活场景中进行测试,涵盖办公、健身、跑步、跳舞及日常活动等各类动作。数据显示,该系统整体误差仅4.5°±0.6°。
进一步分解到不同运动自由度,无论是肩外展(HAA)、升降(ED)还是内外旋(IER),融合算法都表现出明显优势:系统输出的角度曲线几乎与光学运动捕捉(OMC)“重合”,而传统方法则出现明显偏差甚至漂移。值得注意的是,这种高精度并不依赖特定动作类型,说明系统在复杂真实环境中具有良好的泛化能力。
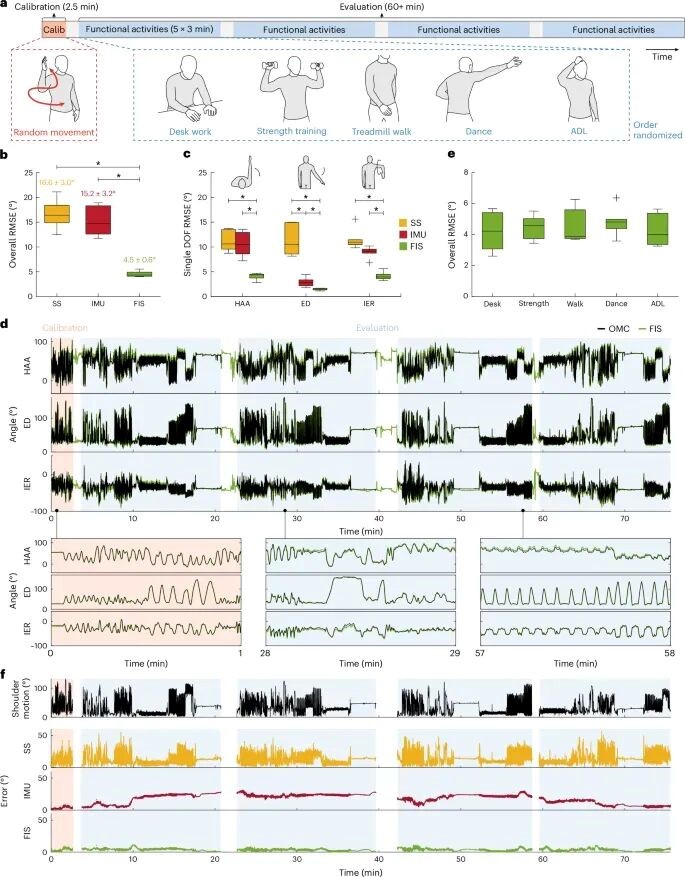
系统在多种真实活动中的性能表现
在与已有研究对比中,该系统不仅实现了与先进方法相当甚至更优的精度,还将可持续监测时间从“几分钟”提升至“超过1小时”,实现技术突破。同时该系统数据效率高,传统机器学习需海量数据训练,而该方案仅需 2.5 min训练数据,就能支撑 60 min以上的精准监测,极大降低了数据采集成本。
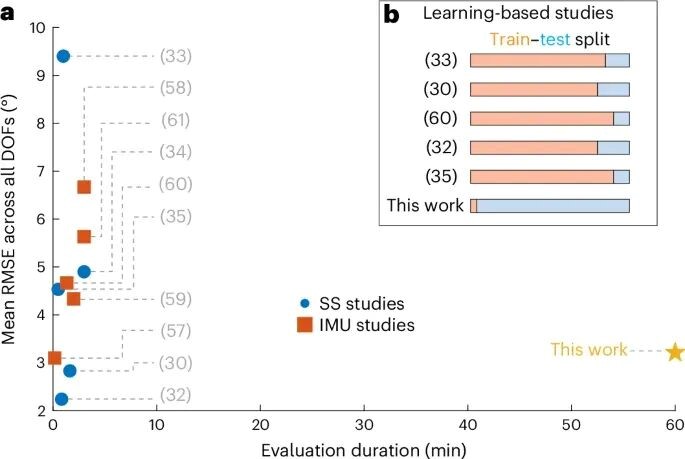
与现有技术对比结果
这项研究提出了一种兼顾精度、稳定性与实用性的可穿戴运动捕捉新方案,实现了真实场景下长时间、高精度的肩关节三维运动追踪。为可穿戴运动监测技术提供了一条实用路径。
相关成果以“Minimal-calibration multimodal wearable sensing for long-duration three-dimensional shoulder kinematics”为题发表在《Nature Sensors》上。
※ 有关作品版权事宜请联系:010-84463638转8850 电子邮箱:info#texleader.com.cn
纺织导报官方微信



© 2026 《纺织导报》 版权所有
京ICP备10009259号-3
 京公网安备 11010502045125号
京公网安备 11010502045125号


