全国百强科技期刊
2023年9月19日
纱线人工肌肉可以对外界的刺激(如温度、湿度、光、pH值和电等)做出灵敏的驱动变形响应,在微型驱动器、柔性传感器、软体机器人及智能纺织品等领域表现出较好的应用前景。然而,现有纱线人工肌肉难以兼顾驱动性能、机械性能和结构的长期稳定性,且往往不具备规模化生产能力和可扩展性,成为制约其进一步发展和实际应用的关键问题。
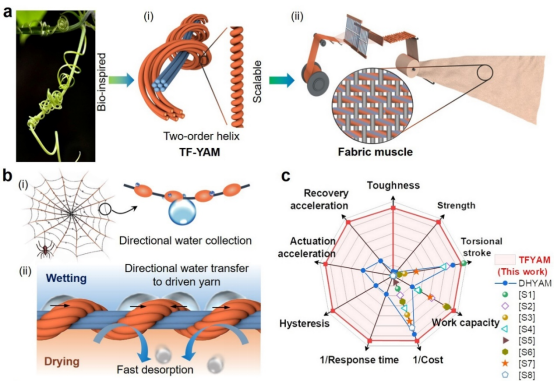
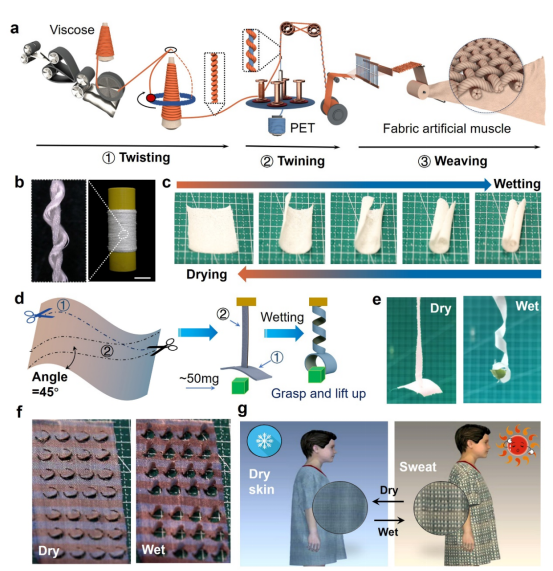
近期,香港城市大学及江南大学的研究团队受自然界中藤蔓交互螺旋结构启发,通过多级螺旋和芯鞘结构设计,将低成本的粘胶纤维和涤纶纺制成兼具快速响应、低滞后性、大扭转冲程和结构稳定的藤蔓结构纱线人工肌肉,并在此基础上结合纺织拓扑编织技术实现了织物人工肌肉的规模化生产,有望广泛应用于智能纺织品、软体机器人等领域。
研究人员通过将低成本的亲水粘胶纤维包覆在外层,相对疏水的涤纶长丝处于内层,从而基于润湿梯度和拉普拉斯力作用形成了定向的水传导作用,加速了湿驱动过程的液体传导;同时由于亲水纤维处于包覆外层,有利于加快回复的放湿过程,因而提升了人工肌肉的驱动冲程、功率密度和响应速率,而且借助芯鞘结构增强了结构稳定性和力学鲁棒性。
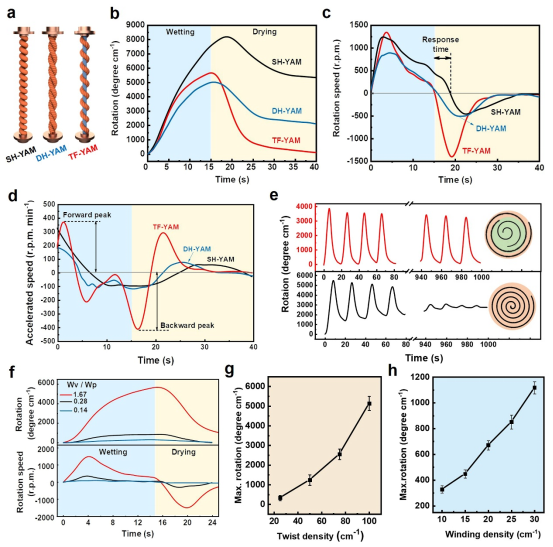
由于藤蔓结构纱线人工肌肉独特的双级螺旋和芯鞘结构,与现有的单/双螺旋纱线人工肌肉相比,突破了扭转加捻极限,在驱动性能上展示了突出的优势。此外,藤蔓纱线结构人工肌肉在50次循环周期后性能基本保持不变,展现了其良好的驱动稳定性。通过探讨不同因素影响,发现随着混纺比、粘胶纤维捻度以及包缠密度的增大,纱线人工肌肉的性能均有所增强,这对进一步提升纱线人工肌肉的性能研究具有指导意义。
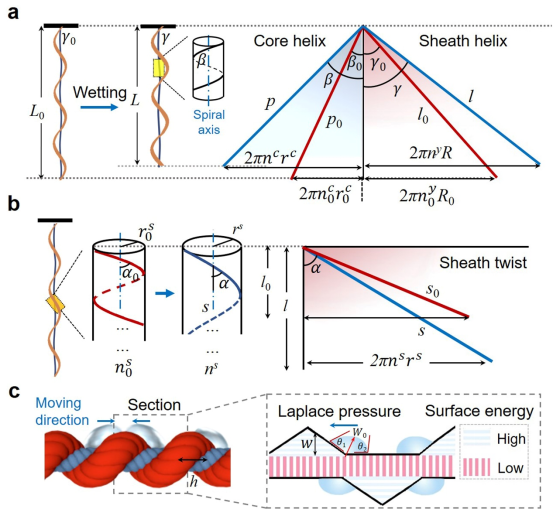
通过对纱线人工肌肉的多级螺旋结构进行几何和物理解析,研究人员阐明了各几何参量影响驱动能力的规律。此外,由于藤蔓结构纱线人工肌肉因其表面独特的驼峰式结构产生了拉普拉斯压力差,加快了水分的扩散速度,结合纱线材料亲疏性诱发的表面能差异共同加快了人工肌肉对水分的响应速度。
基于藤蔓纱线结构纱线人工肌肉的高度可扩展性,利用现代纺织技术能够实现纱线人工肌肉的大规模纺制;将其进一步拓展到生产织物人工肌肉,可实现人工肌肉的空间响应变形。该策略有助于推进纤维基人工肌肉应用于柔软机器抓手,并为可智能调节个人热湿管理织物和智能服装的开发提供了可行的方案。
据悉,该研究成果以Advanced Fiber Materials“High-Performance Fasciated Yarn Artificial Muscles Prepared by Hierarchical Structuring and Sheath-Core Coupling for Versatile Textile Actuators”为题发表在Advanced Fiber Materials上。
(来源:Advanced Fiber Materials)
※ 有关作品版权事宜请联系:010-84463638转8850 电子邮箱:info#texleader.com.cn
纺织导报官方微信



© 2026 《纺织导报》 版权所有
京ICP备10009259号-3
 京公网安备 11010502045125号
京公网安备 11010502045125号


